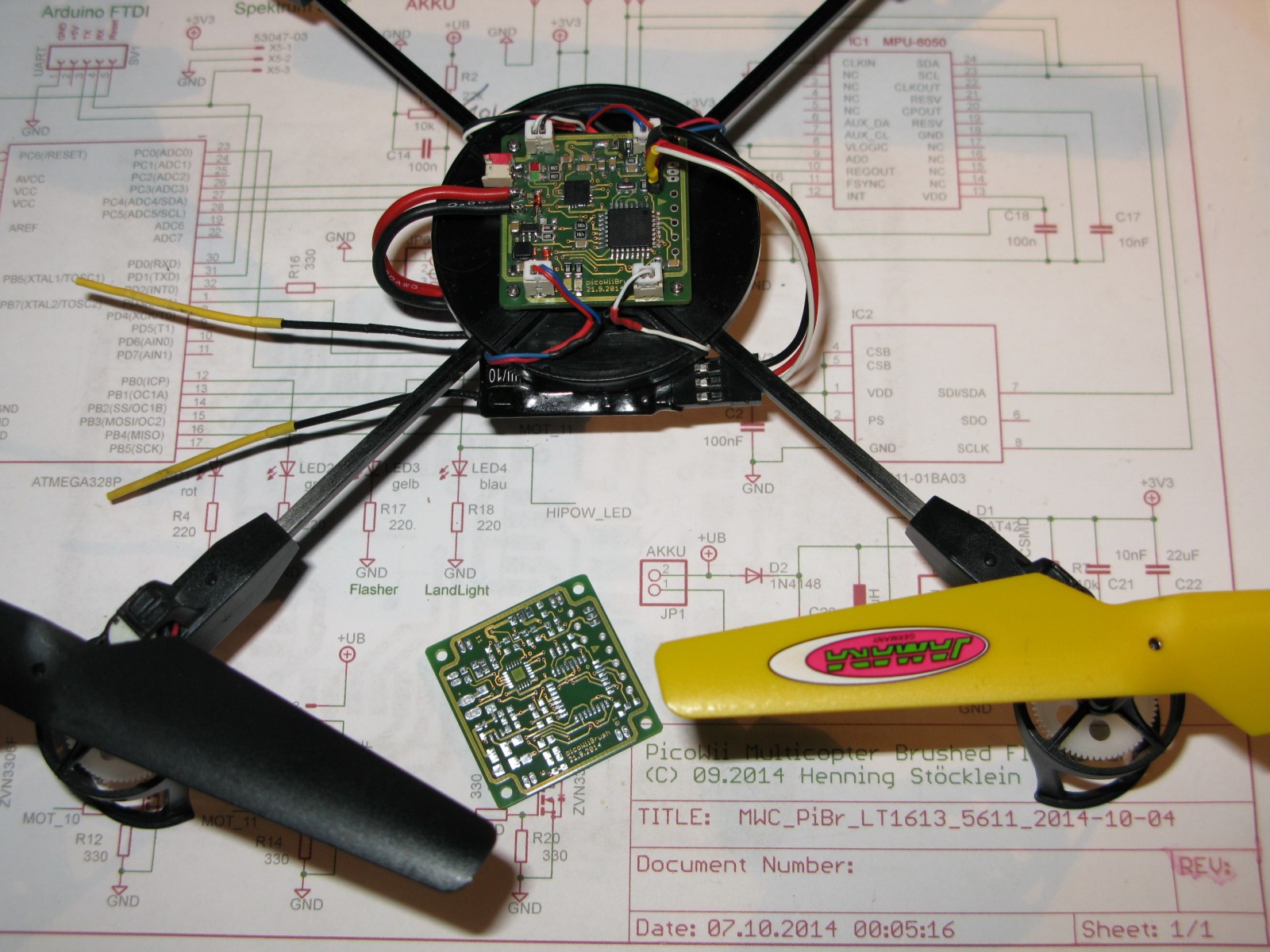
Die Platine ist einbaukompatibel zum Jamara-Controller und kann daher direkt in den Quadcopter eingebaut werden.
Aus dem Jamara-Controller lassen sich die Motor-Endstufen und der Gyrosensor ablöten und weiterverwenden.
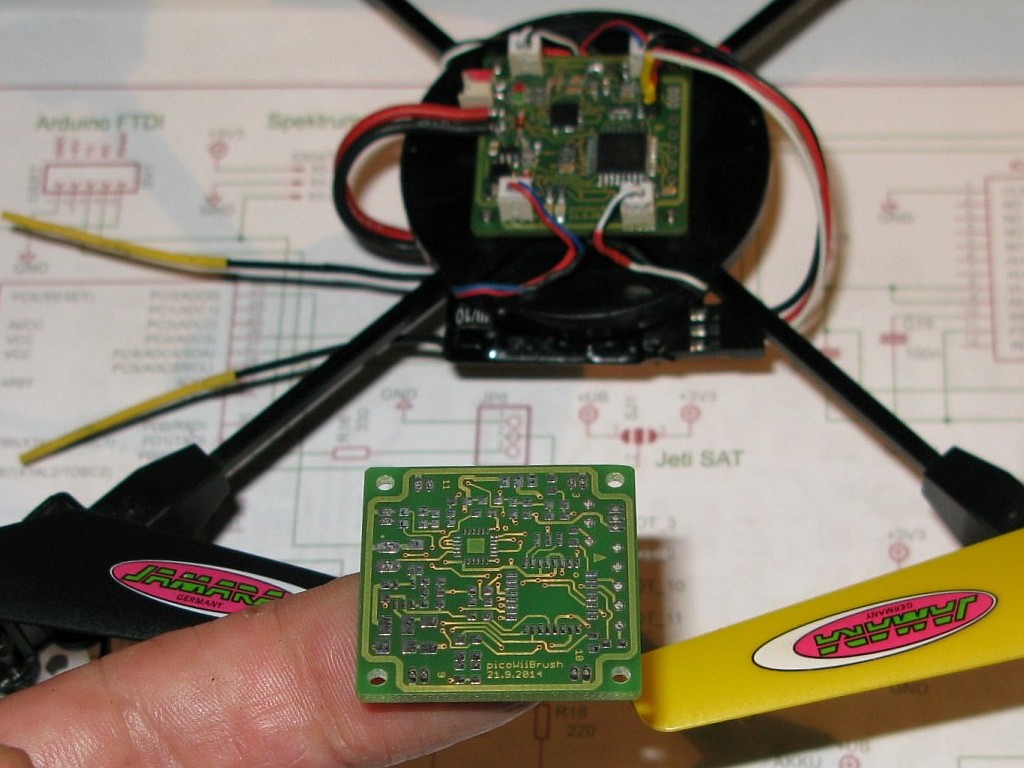
MWC PicoWii - eine kleiner Flightcontroller für Quadcopter mit DC-Motoren z.B. in der Größe des BL180X
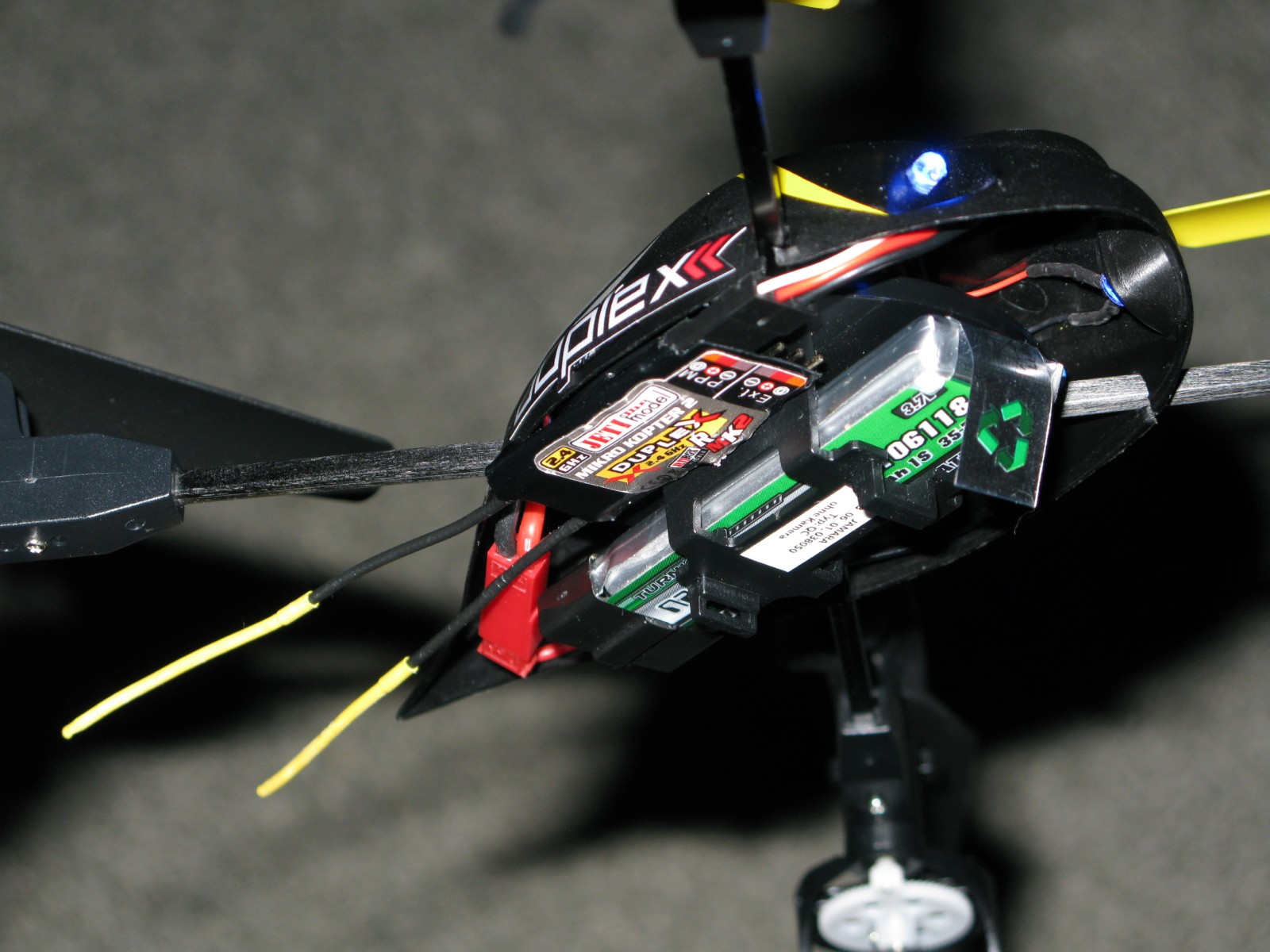

Das Licht ist schaltbar, ausserdem ist ein weiterer Schaltkanal für die Kamerasteuerung herausgeführt.
