
58 cm
Motorabstand
3-Achs
880g
Idee und Firmware der Lagestabilisierung stammen von einem französischen Quadrocopter-Entwickler, siehe hier.

Motoren, Regler und Propeller stammen von Hobbyking. Der Akku ist ein Hobbyking 2200 3s.
Auch der 9ch-Sender stammt vom Chinesen - er wird allerdings mit Jeti-Sendemodul und ER9x Firmware betrieben.
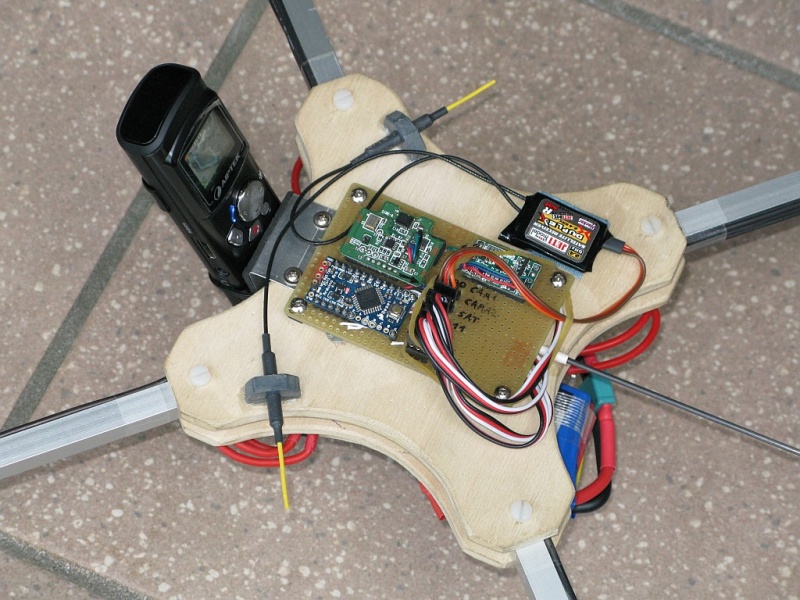
Die Zentraleinheit basiert auf einem Arduino-Prozessorboard Mini Pro 328 mit einem 16Mhz getakteten Atmel AVR mega328, das einen Wii Motion Plus 3-Achs-Gyro und einen Bosch BMA020 3-Achs Beschleunigungssensor auswertet.
Empfangsteil ist ein Jeti-Satellit, der sein Summensignal direkt an den Arduino abliefert.
Es werden alle 6 von der WiiCopter- Firmware ausgewerteten Servokanäle verwendet (Motoren -Scharf und ACC-Mode liegen auf eigenen Kanälen).

Die HD-Videokamera ist derzeit noch autark und auch ohne SteadyCam- Plattform (das ist in der Firmware und auf dem Zentralboard allerdings bereits vorgesehen).

Durch die 3-Achs- Stabilisierung mit MEMS- Gyros ist er sehr gutmütig zu fliegen, solange man die Fluglage sauber erkennt ("Kugel = vorne").
Mit den 4 Motoren und 9x5 Propellern ist das Fluggerät sehr kräftig motorisiert und hat etwa 11 Minuten Flugzeit.
