
48 cm
Motorabstand
3-Achs
1030g
Der Controller ist ein FLIP32-10DOF auf ARM Cortex M3-Basis, also ein 32-Bit Rechner, der mit der offenen Firmware "Cleanflight" läuft. Als Motorregler verwende ich 4 x Multistar 20A Opto, auf BLHeli 14.0 umgeflasht.
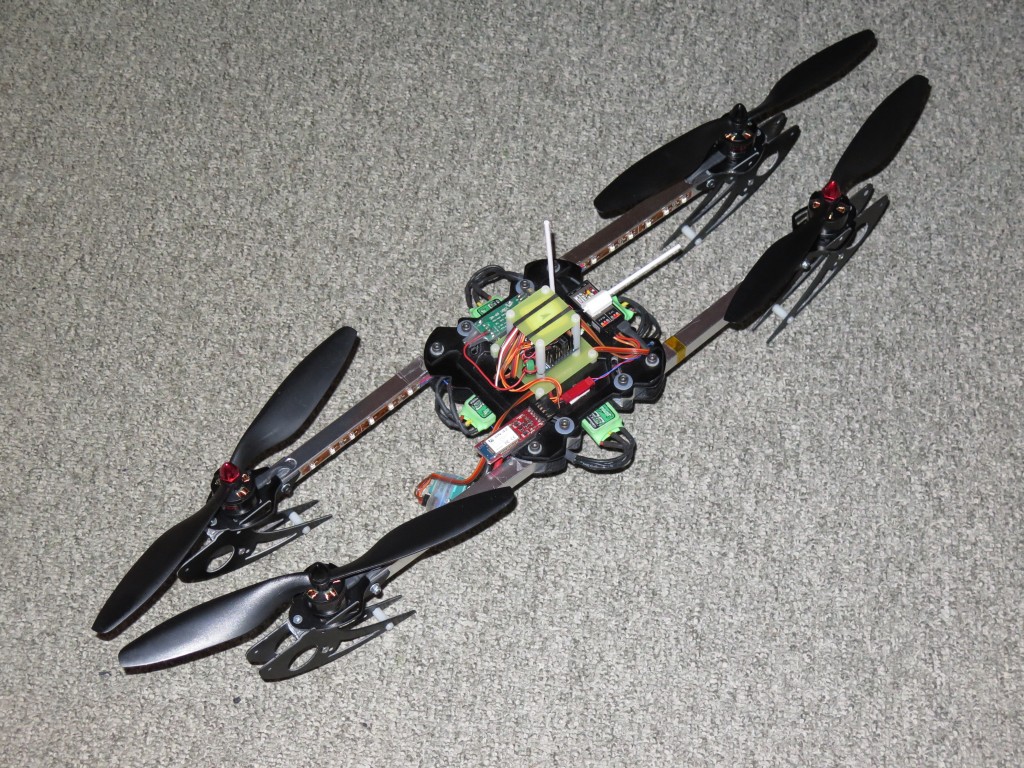
Dadurch hat der Quadcopter etwa 480mm Motorabstand. Die Motoren sind deutlich steifer am Rahmen befestigt, ausserdem durch den Abstand vom äusseren Arm-Ende bei Crashs besser geschützt.

An 3s 2400mAh liegt der max. Strom bei ca. 45A, der Schwebestrom ohne Zusatzlast liegt bei ca. 9A.
Durch die weissen und roten LED- Streifen ist der Copter auch bei Dunkelheit problemlos zu erkennen.
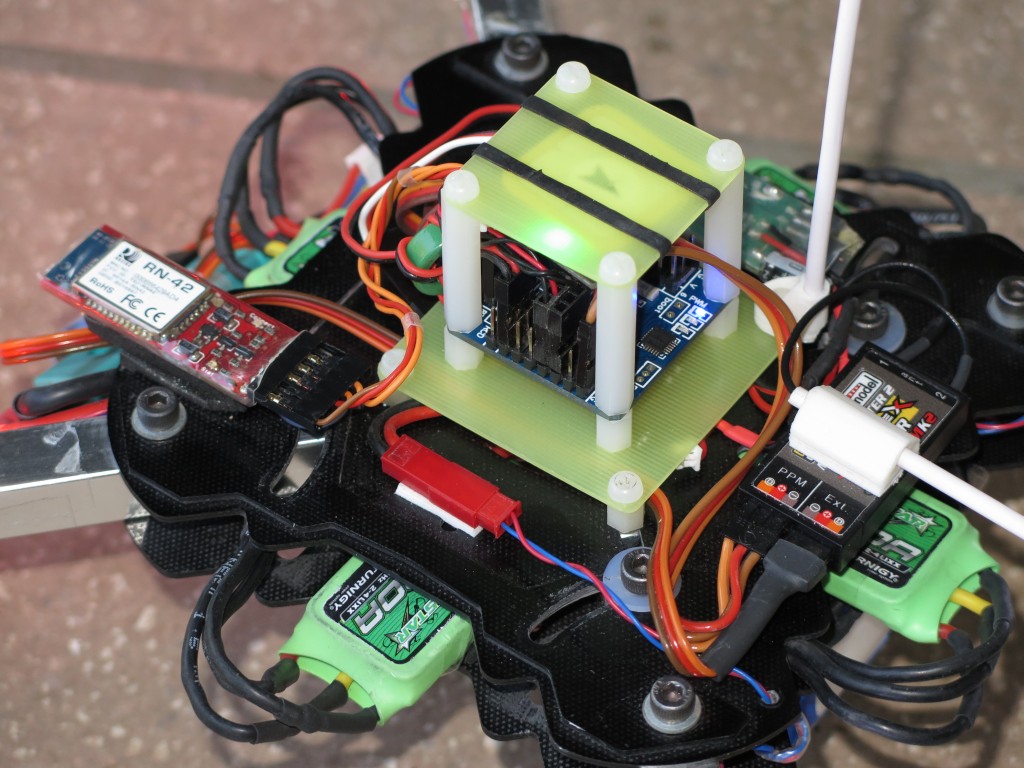
- Flightcontroller FLIP32-10DOF auf Rechnerbasis ARM Cortex M3 (32Bit, 72Mhz) mit Gyro, ACC, Baro und Kompass
- GPS Ublox Neo6-M
- 4 x ESC Multistar 20A opto (auf BLHeli 14.0 umgeflasht, sonst unbrauchbar!)
- Jeti RMK2
- Telemetriesensor Unisens-E
- Bluetooth RN-42
- HK UBEC 3A
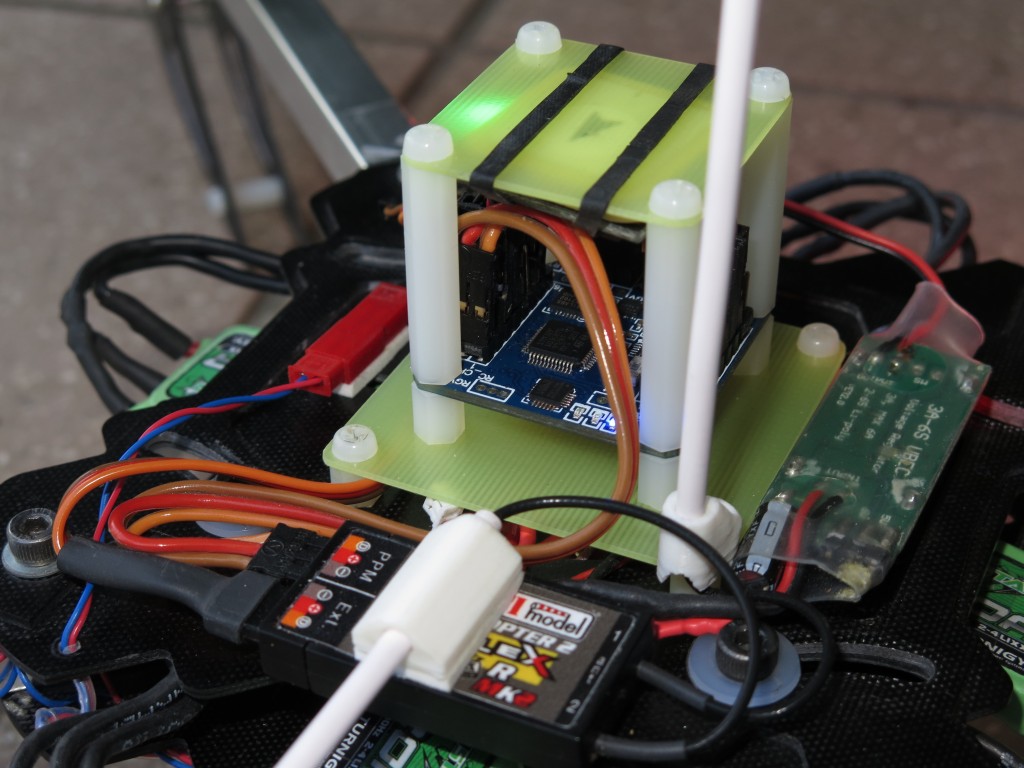
Durch die große Patchantenne und die Batteriepufferung hat das GPS innerhalb wenigen Sekunden einen 3D-Fix.
