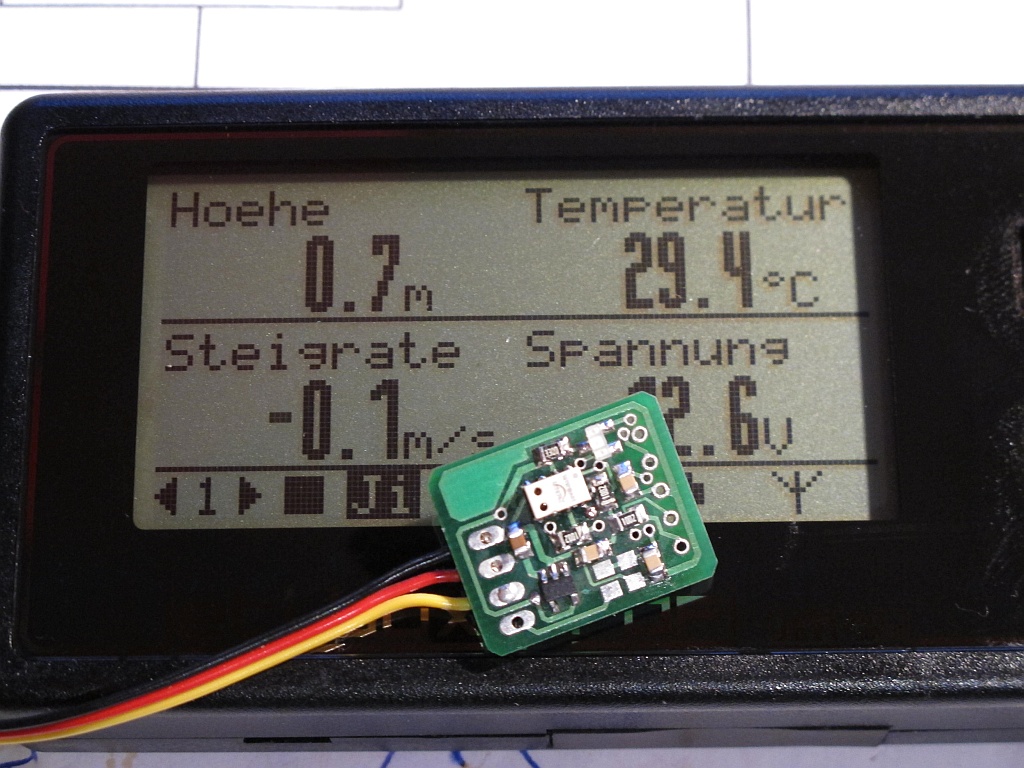
Unter dem Arbeitstitel "myVario" kann dieses nur briefmarkengroße "Einfachst-Vario" Höhe, Temperatur, Steigrate und Akkuspannung messen und über das Jeti Duplex EX-Protokoll per Telemetrie an den Sender übertragen.
- 0.8mm dünne PCB
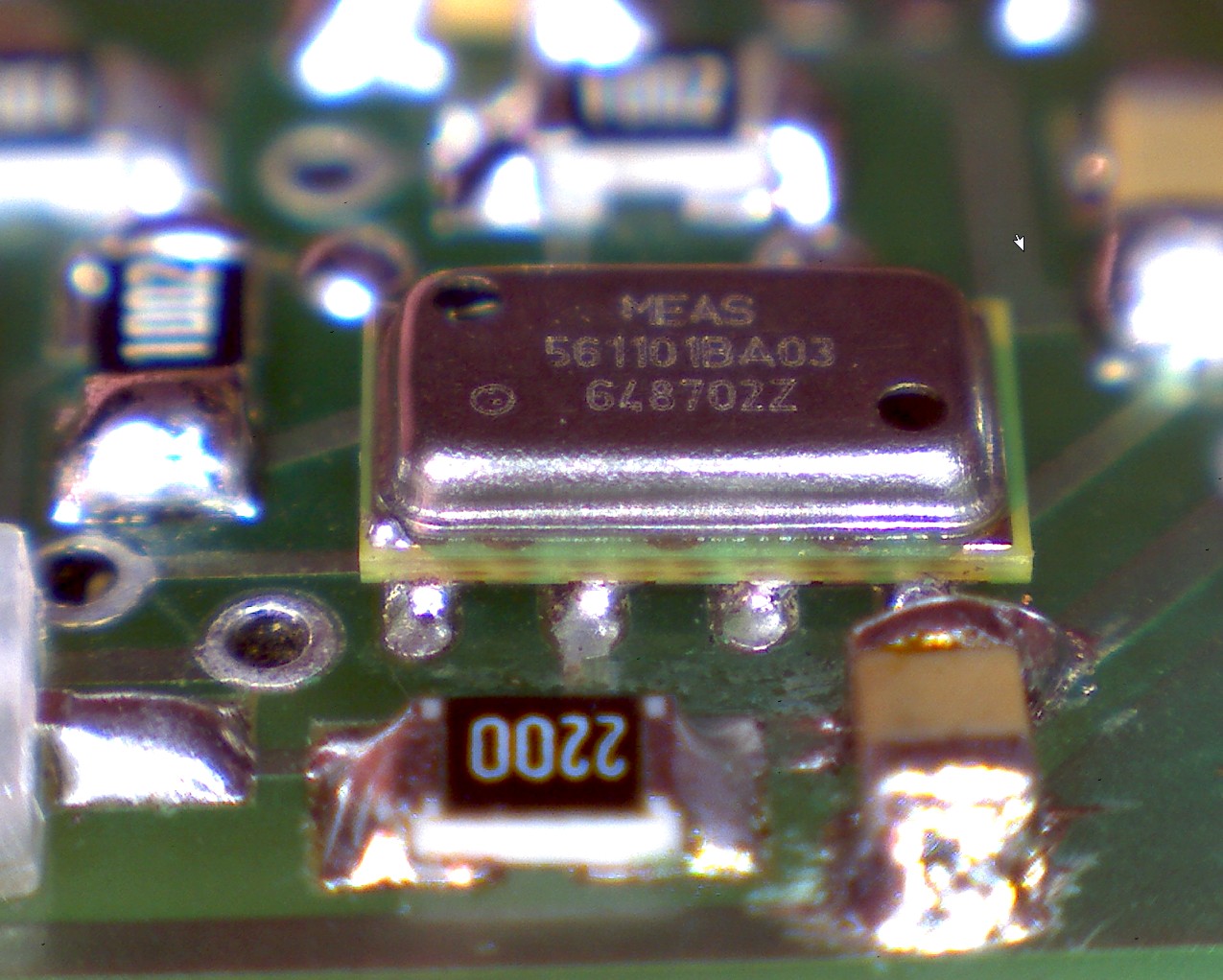
- 2 Sensoren MS5611
mit Stahlkappe
- ATmega328 - 16MHz
- Molex Microstecker
"Picoblade"
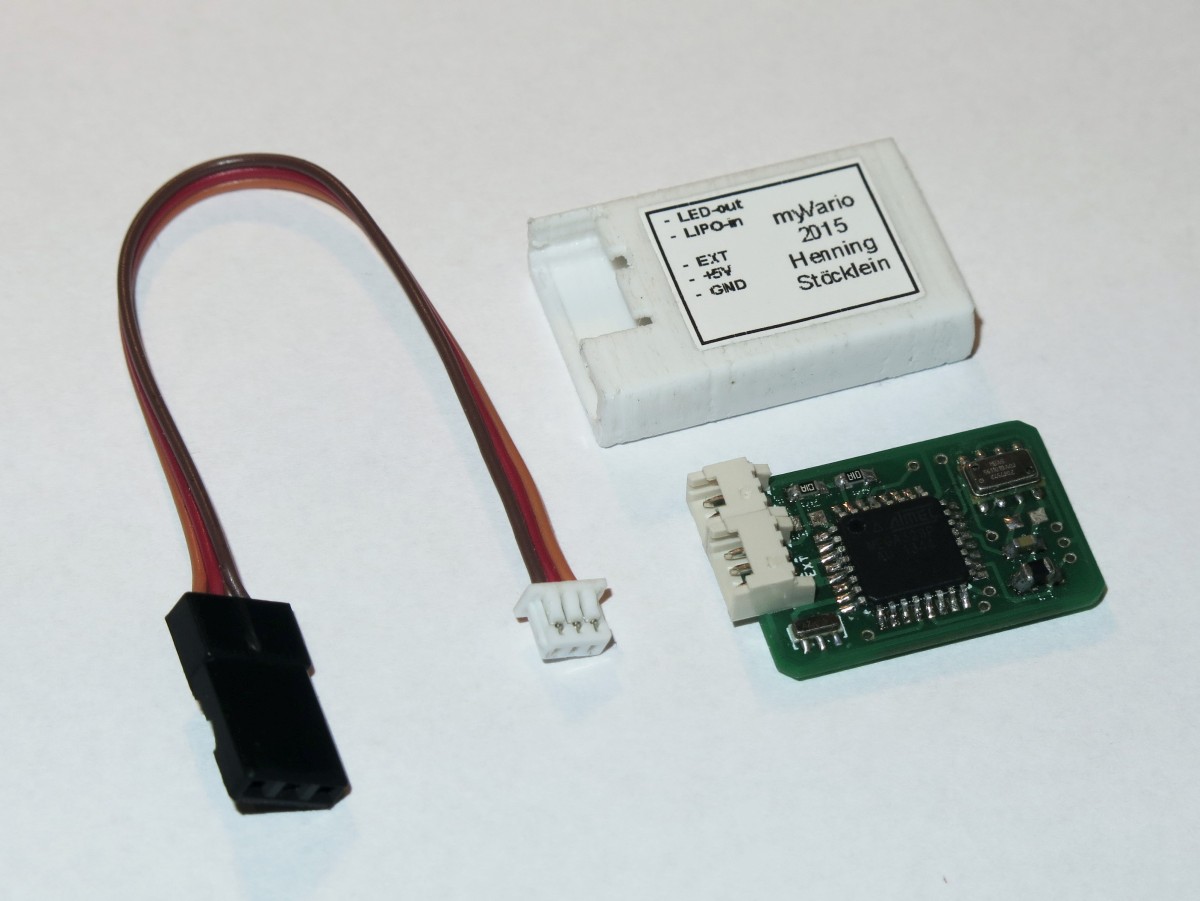
Das Servokabel kann einfach abgenommen und bei Bedarf durch ein längeres ersetzt werden.
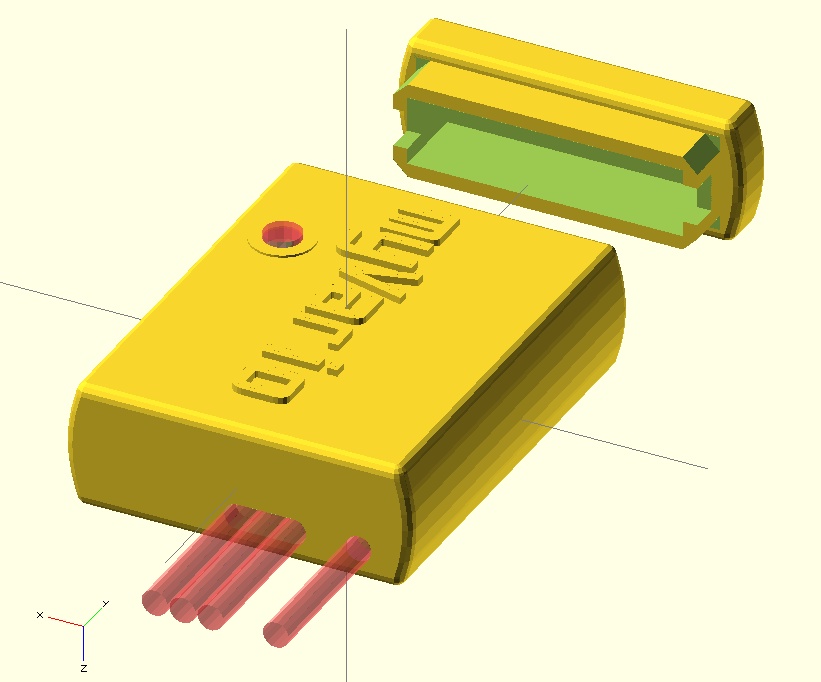
Die Gehäusefarbe ist noch nicht final...
einbaufertig...
Die Software ist weiterentwickelt vom bisher einfachen Barry-Dorr-Filter hin zu einer Korrelationsanalyse der Höhen/Zeitdaten.
Ob 1 oder 2 Sensoren verbaut sind, wird automatisch erkannt und berücksichtigt.
Der Sensor wird mittels I2C an den Controller angebunden. Das System wird mit 16MHz getaktet und läuft auf 3.3V, (bei diesem uC-Takt ausserhalb Atmel-Spec., aber in allen Exemplaren bisher robust).
Die ersten Software-Versionen waren noch eine für das Jeti EX-Protokoll modifizierte Version des "OpenXvario" in Arduino programmiert (OpenSource- Projekt von Rainer Schlosshan).
Inzwischen habe ich aber komplett eigenen Code in WinAVR C geschrieben, der ein menügesteuertes Setup der EEPROM-Parameter bietet und modular zu meinen myMUI EX Sensoren passt.
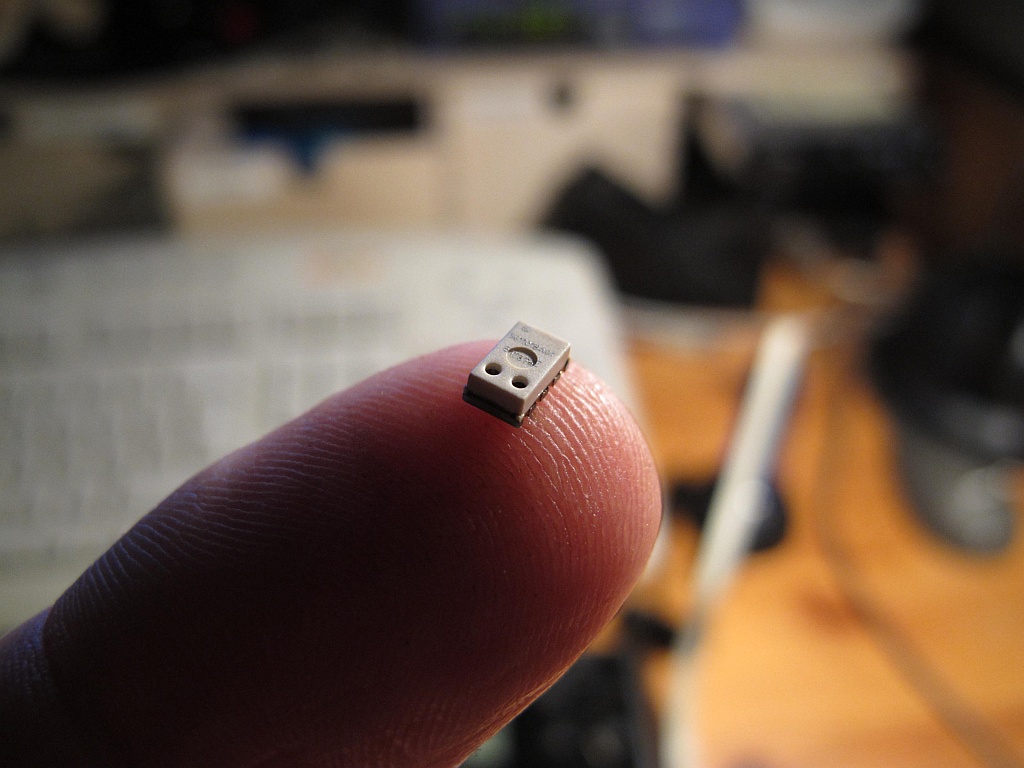
Das Kunststoffgehäuse der LCAP-Version ist etwas wärmeempfindlich, dafür liegen die Pads aber etwas am Eck, sodass sie selbst beim manuellen Löten gut zu benetzen sind.
Die Pads sitzen nahezu komplett auf der Unterseite, sodass manuelles Löten keinen richtigen Spaß macht...
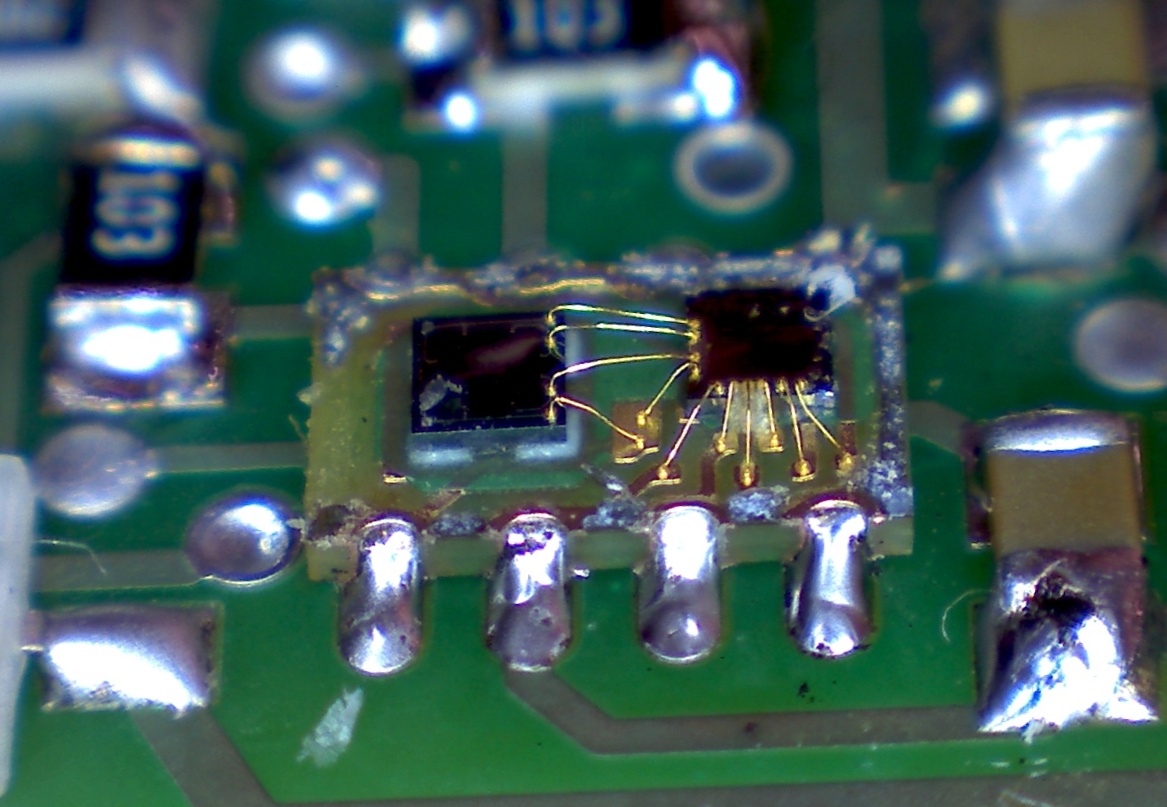
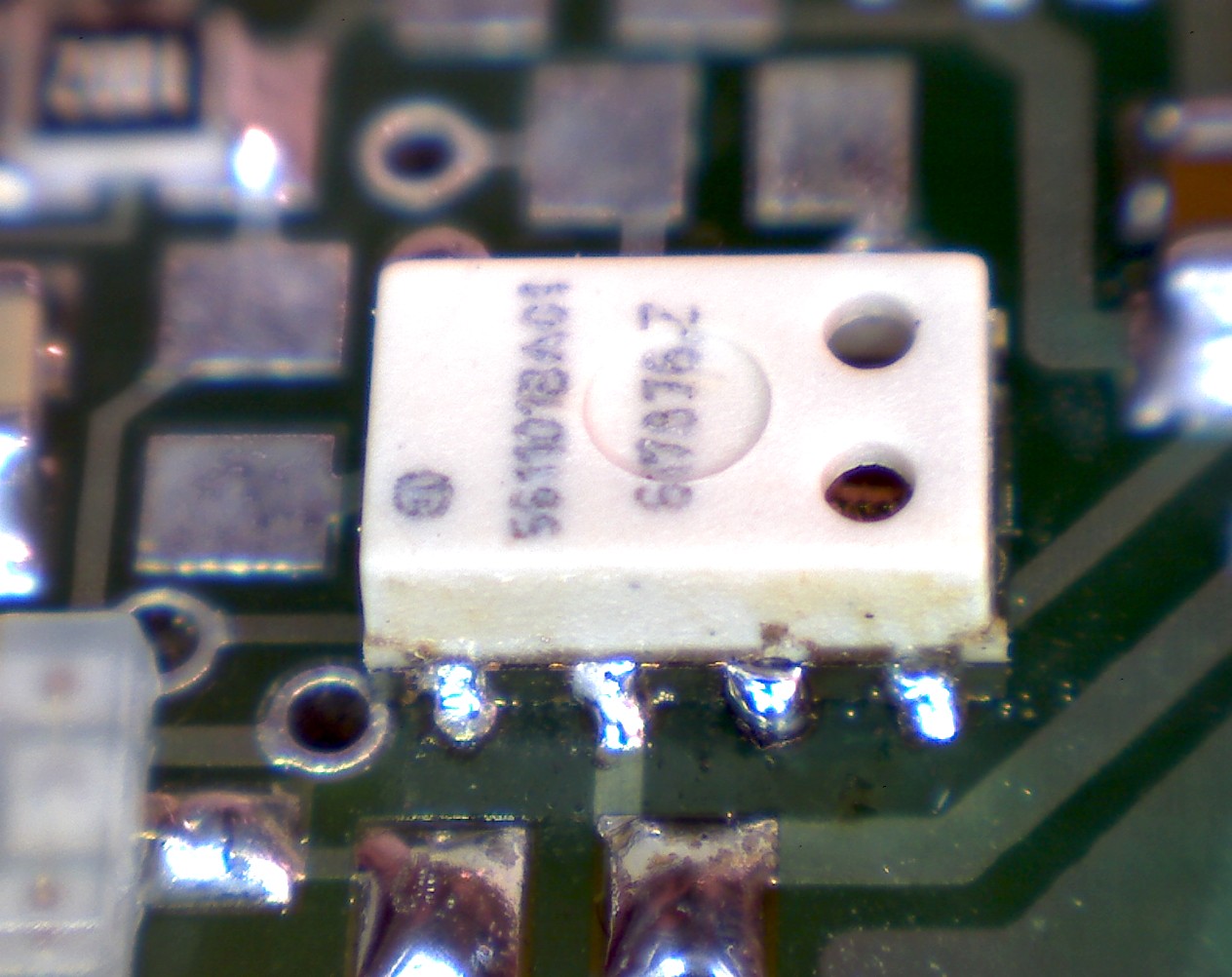
So sieht der MEAS MS5611 in der LCAP-Version übrigens von innen aus.
Links der MEMS-Chip, rechts der I2C-Interface- und Logikbaustein.
Wenn man den Deckel danach vorsichtig wieder aufsetzt und mit etwas CA anklebt, überlebt er das sogar...
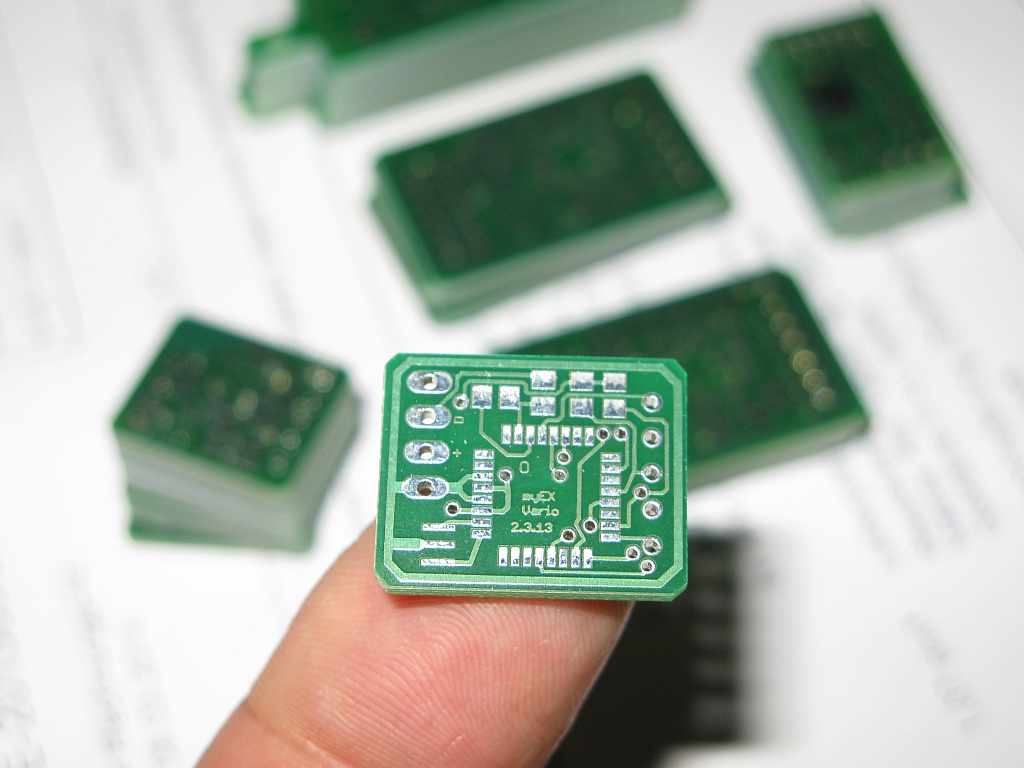
Auf der Unterseite der Platine sitzt der uC mit seinem 16MHz Oszillator, auf der Oberseite u.a. der MEMS-Sensor und eine rot/grüne DuoLED.
Programmiert wird über das recht aussen liegende ISP-Interface (Pinout vom Speedy BL übernommen).
Links unten ein SOT23 LowDrop- Spannungswandler auf 3.3V.
Die unbestückten Lötpads am unteren Rand nehmen bei Bedarf den Spannungsteiler und Tiefpass für die Akku-Spannungsmessung auf.
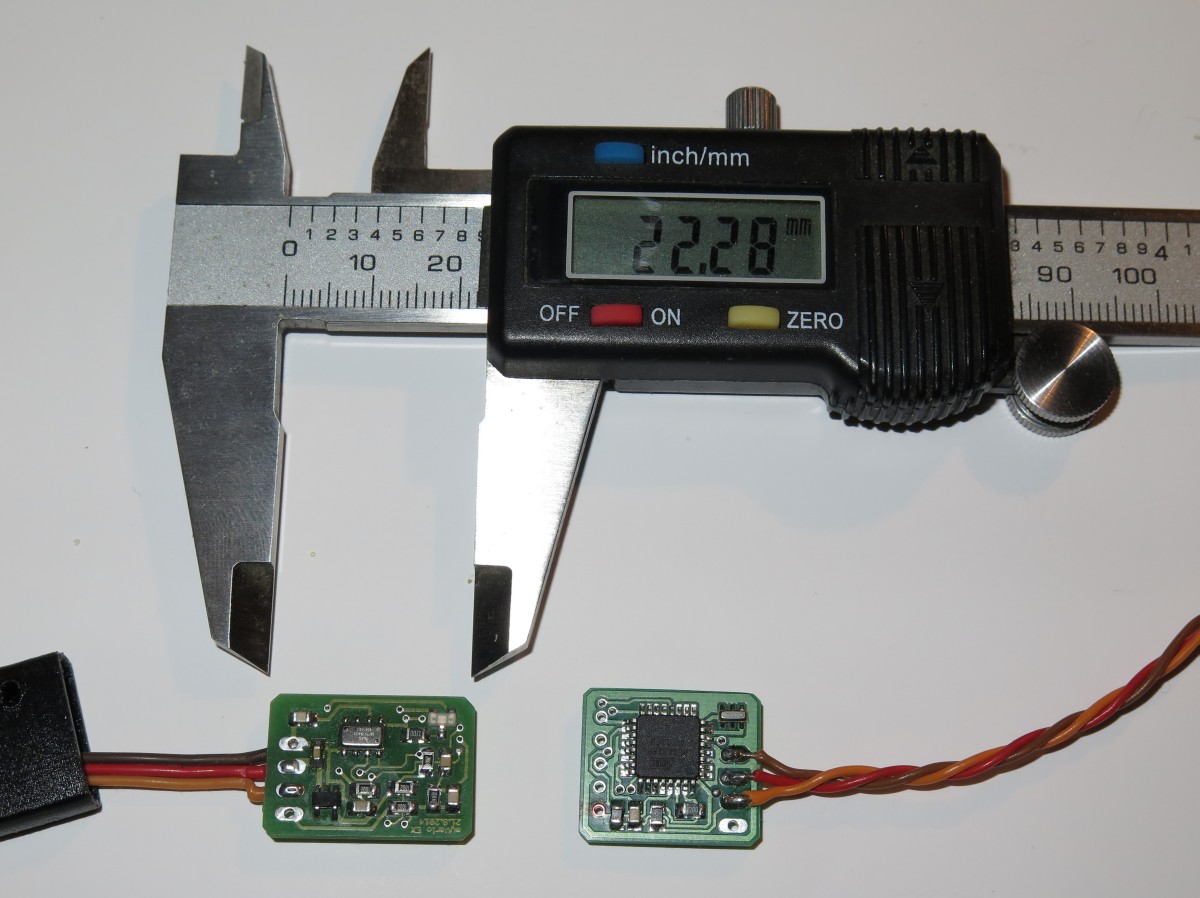
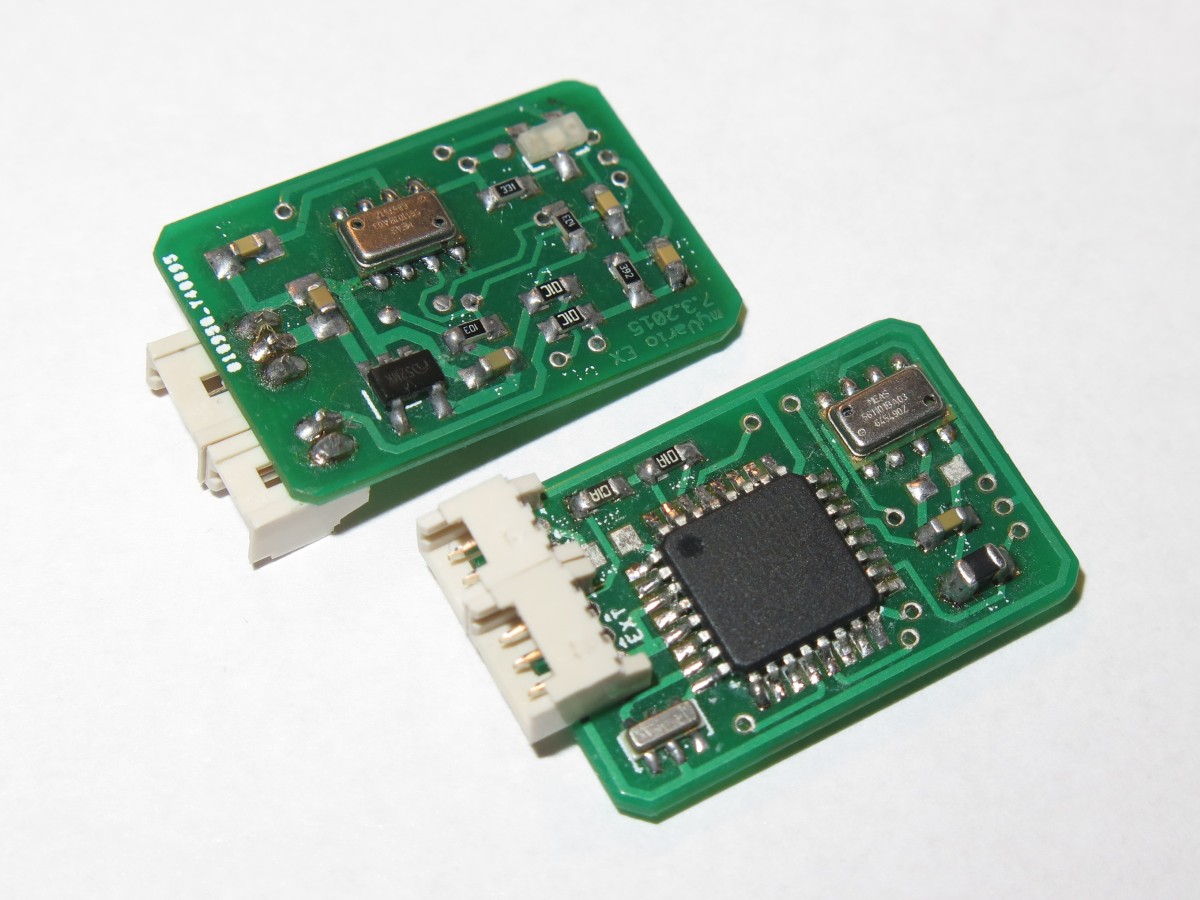
myDualVario (linke Seite)
2 x MS5611 Sensoren auf TOP und Bottom-Side der PCB.
Dadurch nur noch minimales Rauschen (mit Staurohr und alternativer Firmware wäre auch Fahrtkompensation möglich).
Kleinere PCB, da kein ISP-Header mehr (Flashen über Bootloader am Servokabel).
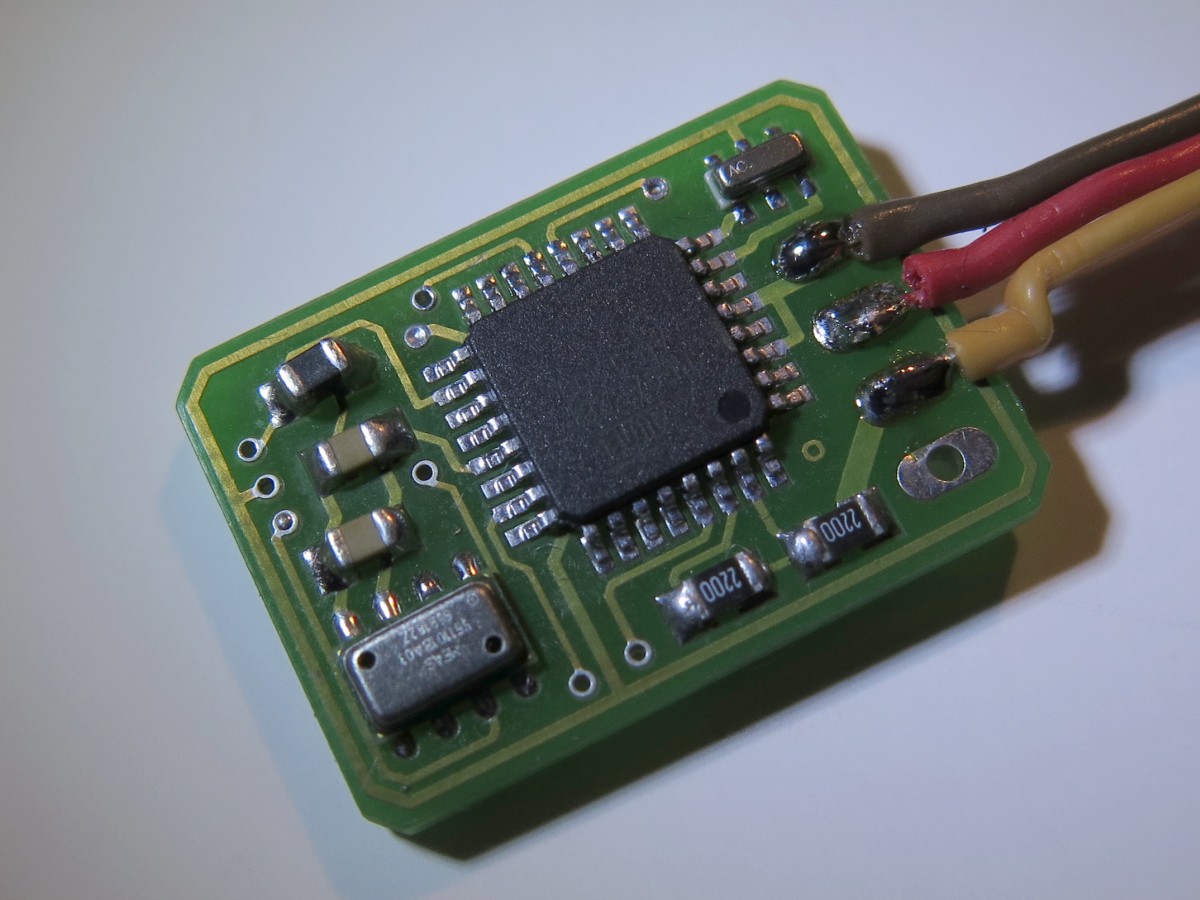
Hier der 2. Sensor, auf der Prozessorseite platziert.
Durch die vergrößerten Pads unter dem SMD-Sensor lässt sich der MS5611 (links unten) mit etwas Übung gut von Hand einlöten.
Auch am Oszillator (oben rechts) sind die Pads gegenüber der Standard-Library aus demselben Grund vergrößert.

Links am Bildrand ebenfalls ein PLA-Gehäuse aus dem 3D-Drucker.
