
Der Mast besteht aus einem CFK-Rohr, in das eine Motorhalterung aus 3 CFK-Platten eingeklebt ist.
Das Schwenklager ist ein CFK-Stab, in einem Aluwinkel gelagert. Seitlich (hier nicht sichtbar) ist an diesem Schwenklager der Microschalter angebracht, der den Servoimpuls des Motorcontrollers bei eingefahrenem Triebwerk unterbricht.

Direkt hinter der Flächensteckung der LS8 liegt der Hauptspant, an den der Aluwinkel geschraubt ist.

Die Aussparung im GFK-Rumpf mittels feiner Dremel- Trennscheibe kostete etwas Überwindung...
Die maximale Breite der Klappe wird vom Motordurchmesser festgelegt (30mm). Durch die beidseitige Verjüngung ensteht eine schlanke Kontur, die aber ein sicheres Einfahren des Propellers ermöglicht.
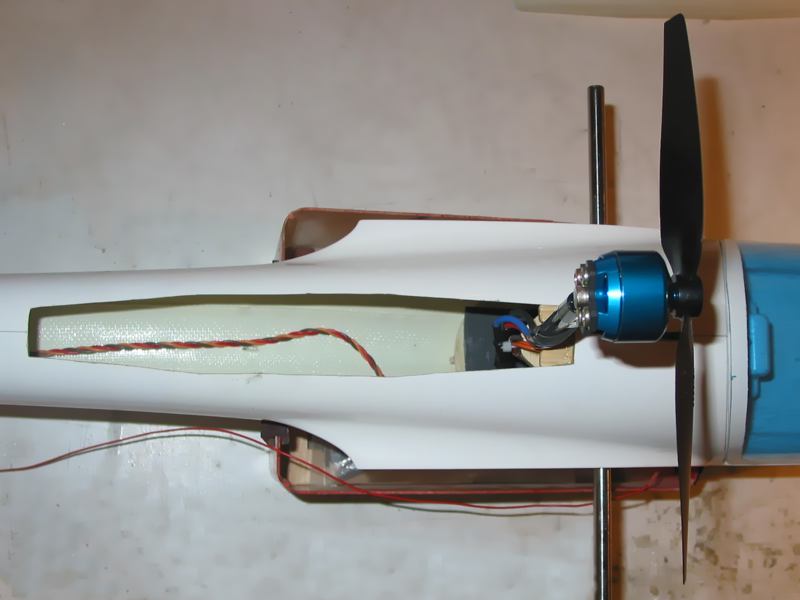
Der Triebwerksarm fährt in der oberen Endlage in eine Führung aus Holz mit halbrunder Aussparung...
Die untere Endlage ist hier noch nicht abgestützt und wird später durch einen entsprechend ausgesparten Depron/GFK-Spanten dargestellt.
Der Rumpf ist um die KTW-Öffnung herum mit CFK-Rovings verstärkt, längs verlaufende Depronspanten sind geplant, hier aber noch nicht eingebaut.

Das KTW wird durch ein umgebautes 9g-Servo über eine kurze Schubstange betätigt.
Statt Servohebel ist ein 10z-Ritzel angebaut, das auf ein 50z-Zahnrad an einer externen Poti-Achse wirkt.
Durch Vorwiderstände am Poti macht dieses Servo 180° Ausschlag und hat ein superhohes Moment.
Stellgeschwindigkeit ist beim KTW nicht gefragt...

Endlich flugfertig, die Rumpfklappe mit 2 Stahldrähten in einem Messingrohr gelagert.
Der rote Gummi in der Klappenmitte wird vom Triebwerksarm beim Einfahren nach unten gezogen und schließt die Klappe sicher.

Auch mit ausgefahrenem KTW ist der Segler eine elegante Erscheinung.
Beim Original mit "Turbo-KTW" ist der Rumpfausschnitt allerdings etwas kleiner und wird durch 2 Halbklappen verschlossen...



Das Video ist mit einer PenCam eDVR 5in1 von der Tragfläche aus aufgenommen.
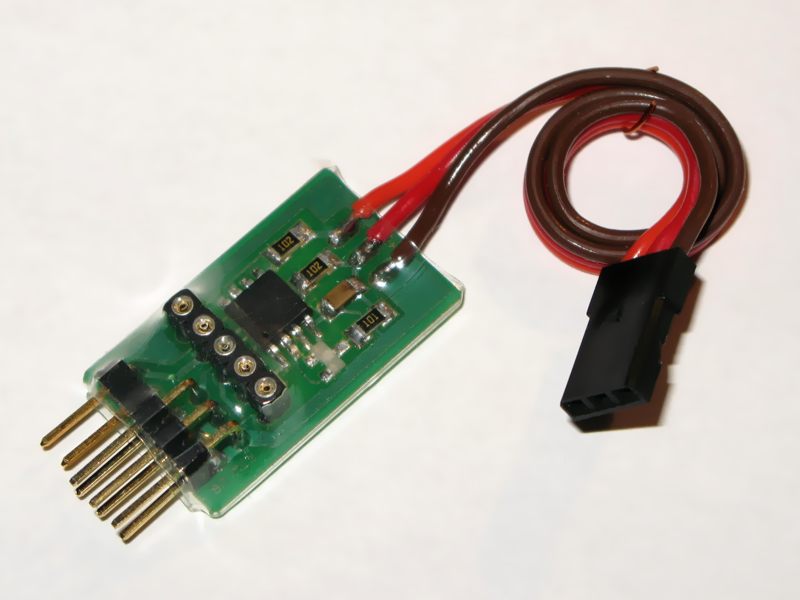
In SMD aufgebaut wiegt das Ding inkl. Kabel nur 4,5g. Der Prozessor AVRtiny25 wird mit 1,6MHz getaktet.
Die Schaltung wird wie ein Servo an den Empfänger gesteckt. An der Steckerleiste sind Endschalter, Armservo und ESC angeschlossen.
Die Software ist noch "roh", kann aber schon folgende
Features:
- Einschaltsperre bei eingefahrenem KTW (per Software, zusätzliche HW-Verriegelung per Impulsunterbrechung)
- Slow-Funktion für Armservo
- Endlagenabschaltung für Armservo zum Stromsparen
- Plausibilitäts-Check des Servosignals
- Speichern der Endlagen im EEPROM
- Statusanzeige per Duo-LED

