
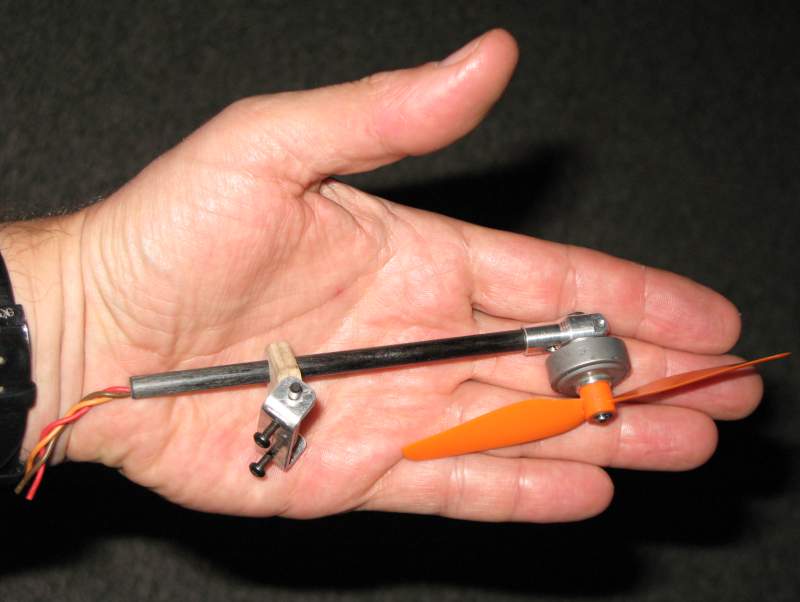
Ein Bild aus der Vorerprobung des Motors: Klapptriebwerk mit einem 20g-CDR.
Hier noch provisorisch angebaut an die 1,2m-ASW von FVK für die Antriebsauslegung.
Es bestätigt sich, dass die ASW mit diesem Motor und einem kleinen GWS-Prop an 3s LiPo mehr als ausreichend motorisiert ist.

Die Statormaße sind D.18 x 5mm, der Motor hat 14 Windungen und stammt ursprünglich aus einem CD-Laufwerk.
Der Propeller wird auf die Rotornabe aufgesteckt, die 3mm-Achse mit 2 Sicherungsringen fixiert (nur lose eingesteckt).
Verbessert gegenüber der LS-8: Die Motorkabel verlaufen im Inneren des Motorträgers.
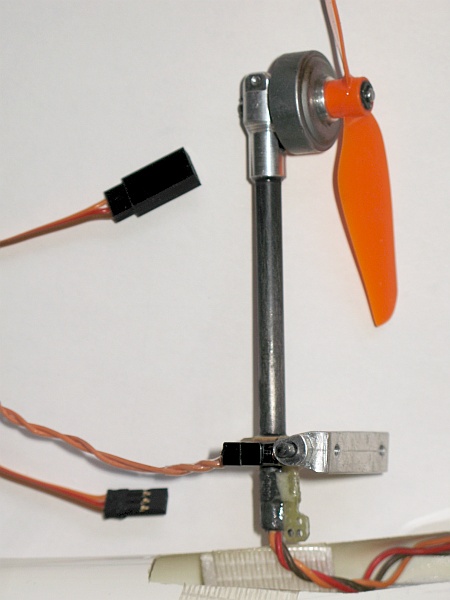
Der Arm ist soweit gekürzt, dass er exakt in den Rumpf passt und ein GFK- Rudelhebel daran Platz findet.
In gekürzter Version hat der GWS-Prop nun 4x4" und bringt auch für einen Bodenstart ausreichend Standschub.
Als 4-Zoll-Baugröße das kleinste mir bekannte (voll versenkbare) KTW ;-)
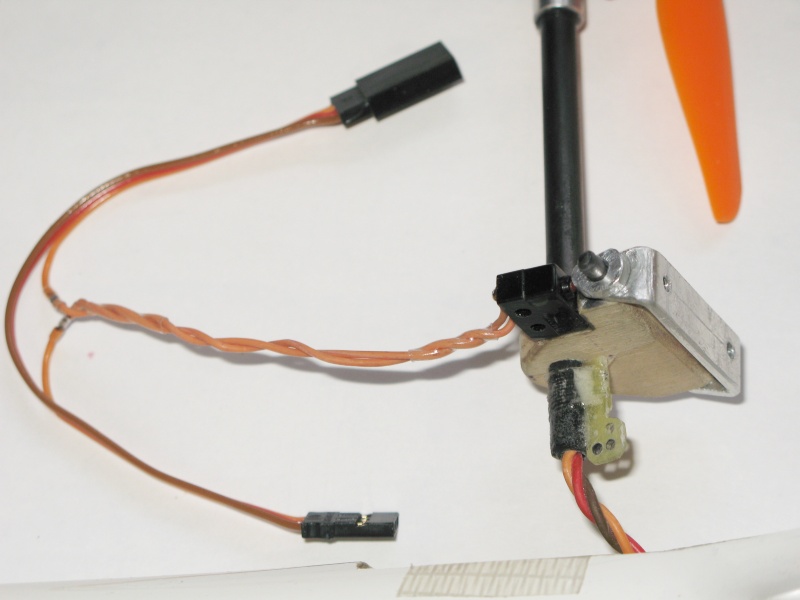
Die Betätigung erfolgt mit einer Schaltnocke aus Alu.
Wichtig: Der Schaltpunkt muss so liegen, dass der Motor erst bei ausgefahrenem Arm anläuft, jedoch (aufgrund der Hysterese) noch mit gebremstem Prop an die Klappe anlaufen kann.
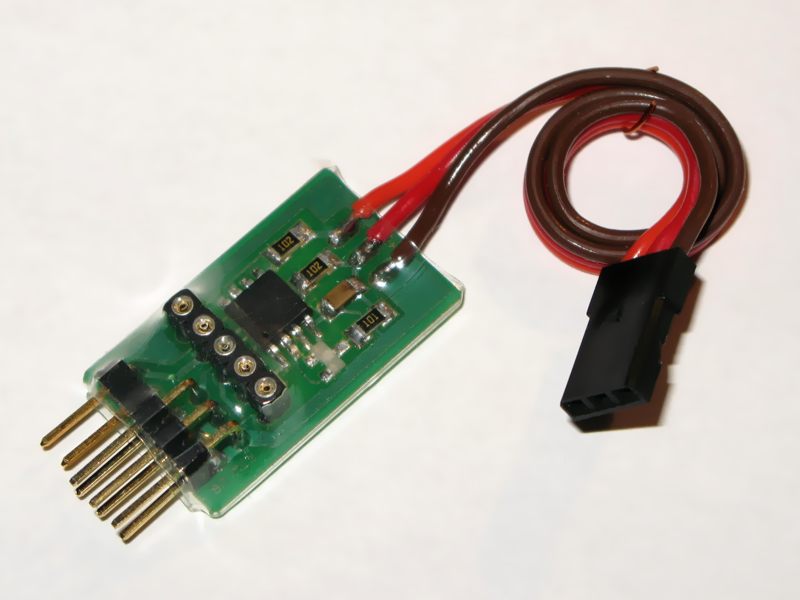
Einzelheiten siehe KTW-Controller

